
High-Dynamics Canard Actuation System CAS
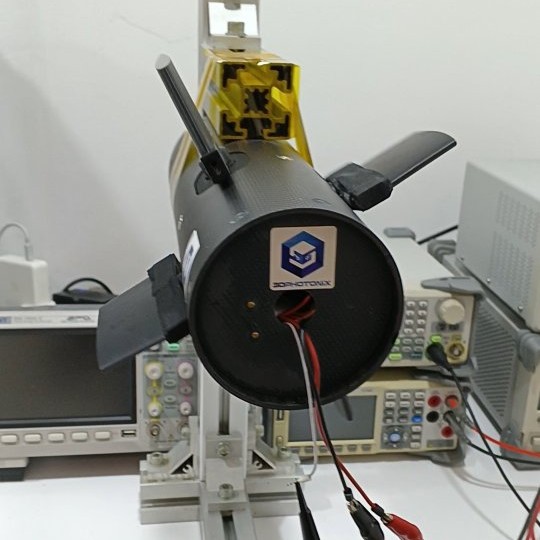
A recent test video showcasing a high-dynamics canard actuation system attracted strong interest across the aerospace engineering community. Beyond the visual demonstration, the system represents a focused engineering effort into fast, precise, and flight-critical control surfaces designed for advanced UAVs and high-performance aerial platforms. At 3DPHOTONiX, this work reflects our capability to deliver tightly integrated actuation, embedded electronics, and control architectures for demanding aerospace applications.
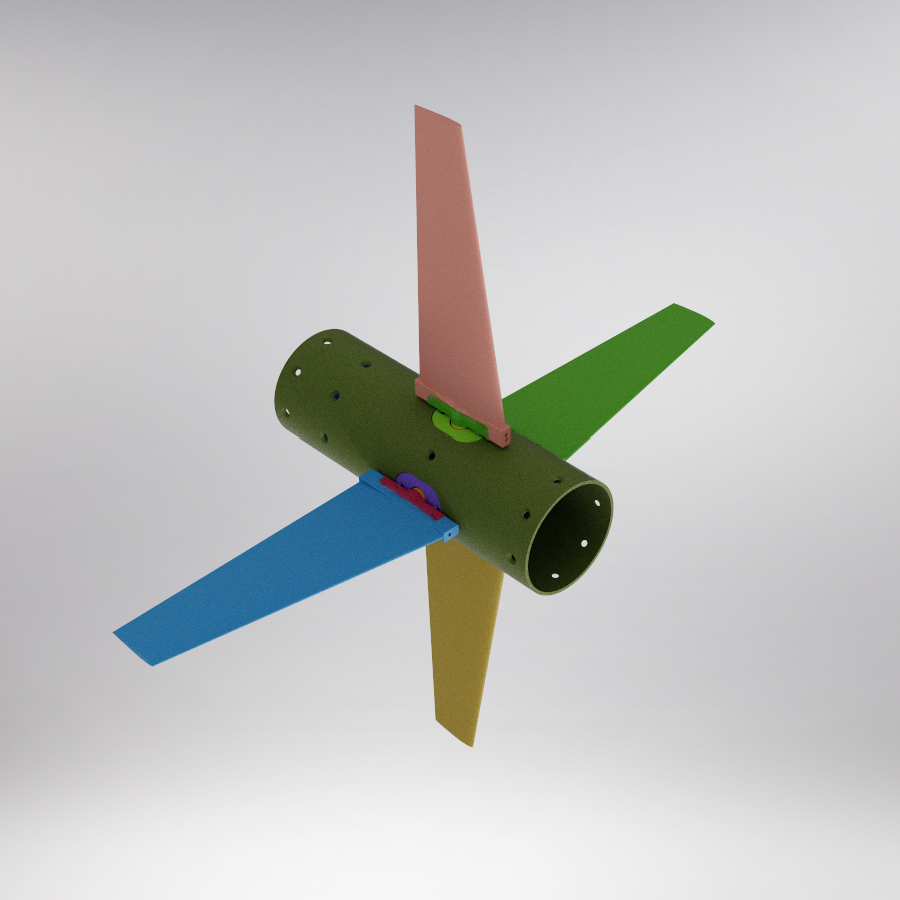
Foldable and Deployable Fin Architecture
The demonstrated system incorporates foldable and deployable canard fins, engineered to remain stowed during storage or launch and actively deploy once the vehicle reaches a flight-ready state. This architecture is particularly suited to compact or high-speed aerial platforms where internal volume is constrained and control surfaces must be protected prior to deployment. The fins and actuation mechanisms are optimized for high-bandwidth, low-latency motion, enabling rapid aerodynamic response for UAVs and other high-dynamics aerial vehicles requiring fast and independent control authority.

Advanced Control and High-Dynamics Actuation
To fully exploit the mechanical and actuation performance, the platform was developed using advanced state-space control techniques, including Linear Quadratic Gaussian (LQG) control with Kalman-based state estimation. This approach enables optimal control under noisy sensor conditions, smooth actuator behavior at high update rates, and stability during aggressive maneuvers, where classical control methods often reach their limits. Such control architectures are essential for high-dynamics aerial vehicles operating across wide flight envelopes.
Simulation-Driven Testing and Control Validation
For system validation and rapid testing, the UAV control architecture can be interfaced with external input devices such as a PlayStation 5 controller, as demonstrated in the video. This interface is used strictly as a development and testing tool, allowing engineers to directly excite control axes and observe actuator response in real time. In parallel, the vehicle and its control laws are modeled within a flight simulation environment, enabling hardware-in-the-loop testing, control tuning, and system validation prior to flight. This simulation-driven workflow allows safe, repeatable development of complex actuation and control systems before deployment on real aerial platforms.
Exploring a high-dynamics actuator or control system for your UAV or aerial platform?
Discuss your requirements with our engineering team and evaluate a custom canard, fin actuation, or control architecture tailored to your application.
.jpg)





